MotoSimEG-VRC软件:基于伺服焊枪的机器人点焊仿真
概述
工业机器人在汽车制造行业中的应用是最为广泛的,其中点焊焊接又是在汽车制造过程中必不可少的,随着工业机器人技术的不断完善,点焊焊接已经完全可以被工业机器人取代。
虚拟仿真技术与工业机器人技术相伴而生,已经成为机器人生产线方案设计与离线编程必不可少的重要环节。MotoSim EG-VRC是安川机器人虚拟仿真与离线编程的专用软件,内部集成了安川机器人所有的工艺应用,如弧焊焊接应用、点焊焊接应用、搬运应用、喷涂应用等。
本期就来为大家介绍一下MotoSim EG-VRC软件工业机器人基于伺服焊枪点焊焊接应用的虚拟仿真方法。
项目创建与机器人系统添加
MotoSim EG-VRC软件中创建一个新的虚拟仿真项目,并在项目的虚拟仿真场景中添加安川机器人虚拟控制系统。
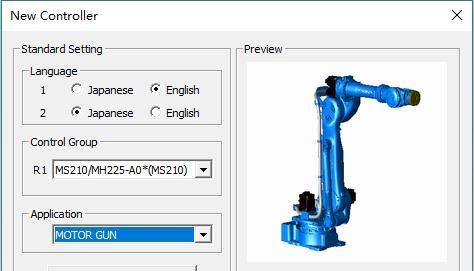
在“Controller”菜单栏下使用“New”命令创建机器人控制器,创建模式选择为“New VRC Controller(no file)”。在弹出的New Controller对话框中设置机器人控制系统参数,详细设置参数如下。
Controller Type:DX200
Controller Name:DX200
System Version:

设置机器人系统语言(Language)、型号(Control Group)、工艺应用(Application),详细设置参数如下所示。设置完成后点击“Standard Setting Execute”按钮,以标准设置创建虚拟机器人系统。
Control Group:R1:MS210/MH225-A0*(MS210)
Application:MOTOR GUN
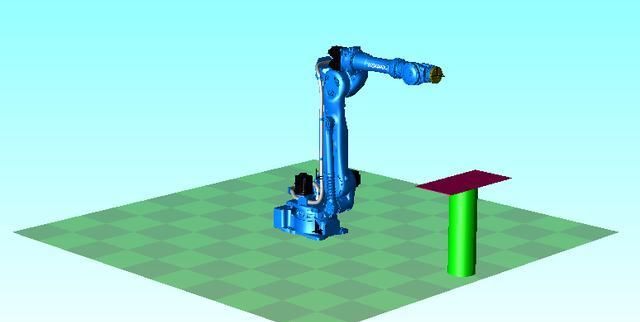
机器人系统创建完成后,虚拟仿真环境中自动添加了选定型号的机器人模型。使用MotoSim EG-VRC软件自带的模型创建工具创建出圆柱体,作为简易工装。再创建一个薄板,作为简易工件。并对其进行合理布局,布局效果如下图所示。
机器人外部轴初始化配置
由于机器人的伺服焊枪属于外部轴,因此需要对伺服焊枪进行初始化配置,这样才能与机器人控制器进行通信连接,实现机器人对伺服焊枪的运行控制。
软件的“Controller”菜单栏中点击“Maintenance Mode”命令按钮,机器人控制器进入维护模式,同时弹出虚拟示教器。
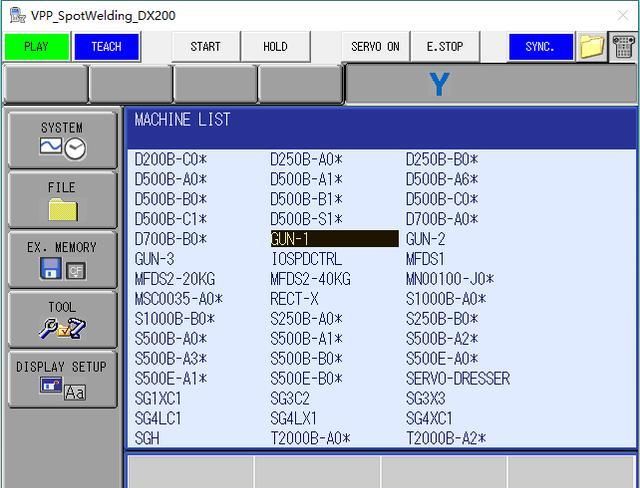
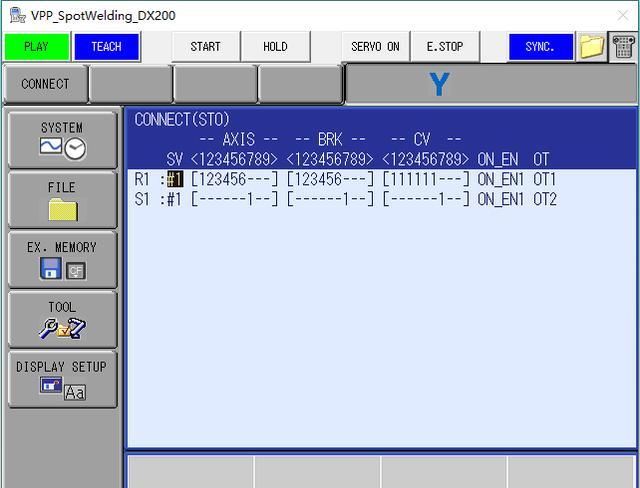
使用虚拟示教器的操作面板依次选择“SYSTEM”→“SETUP”→“CONTROL GROUP”,进入CONTROL GROUP 界面,然后在“S1”后选择“DETAIL”,最后在弹出的MACHINE LIST界面中选择“GUN-1”,也就是将机器人的外部控制组设定为序号为1的焊枪。
在CONTROL GROUP界面中,R代表机器人本体控制组,B代表外部直线运动机构控制组(如机器人行走轴),S代表外部旋转运动机构控制组(如伺服焊枪)。
CONNECT(STO)界面无需任何设置,保持默认即可。
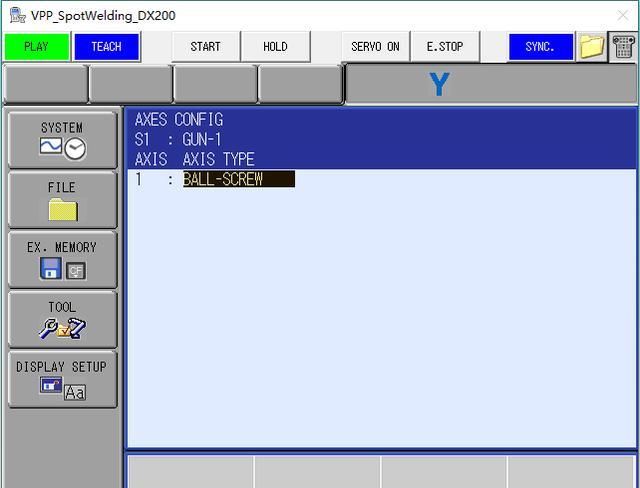
AXES CONFIG界面用于定义机器人外部轴的机械传动形式,如皮带、齿轮、齿条、滚珠丝杠等。对于伺服焊枪,只有滚珠丝杠一种机械传动形式可选,即“BALL-SCREW”。
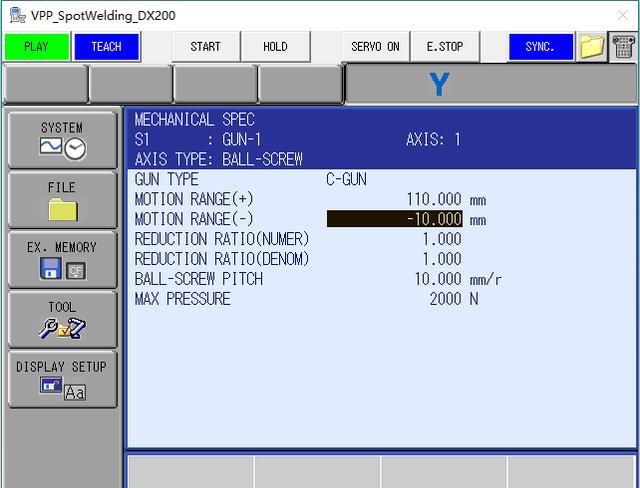
MECHANICAL SPEC界面用于配置机器人外部轴的机械参数,详细配置如下所示。
MOTION RANGE(+):外部轴正方向运动软极限值,如110mm。
MOTION RANGE(-):外部轴负方向运动软极限值,如-10mm。
REDUCTION RATIO(NUMER):外部轴减速机减速比的分子,对于伺服焊枪来说一般没有减速比,因此设置为1。
REDUCTION RATIO(DENOM):外部轴减速机减速比的分母,如1。
BALL-SCREW PITCH:滚珠丝杠旋转一圈焊枪动电极臂直线运动距离值,如10mm/r。
MAX PRESSURE:最大压力,保持默认即可。
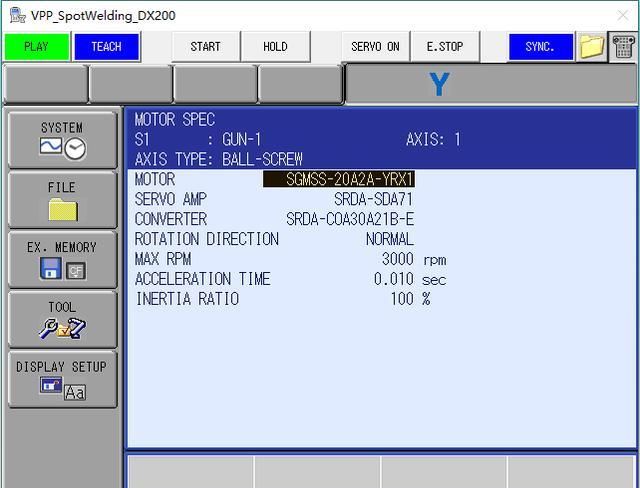
MOTOR SPEC界面是外部轴电机参数配置,可以根据实际使用的电机应用情况进行配置,本例中保持默认值。
全部配置完成确认后,在弹出的所有信息提示对话框中均选择“YES”。然后在VRC Maintenance Mode对话框中点击“End”按钮,完成机器人外部轴初始化配置,待机器人控制器重新启动完成后配置参数生效。
焊枪模型导入与安装
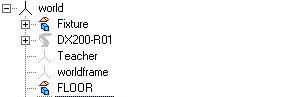
软件“Home”菜单栏中点击“Cad Tree”命令按钮,左侧的Cad Tree中出现自动生成的DX200-S01资源节点。