软件系统|CNC 数控加工机床和机器人的全面集成

将机器人集成到 CNC 数控加工、CAD/CAM 过程控制链和工程设计中会带来很多好处,例如它可以在简单的上下料等操作任务中、在制造一体化和平行于机动时间、辅助时间的加工任务中使用。
西门子的‘Sinumerik Run MyRobot’软件系统提供了多种将机器人集成到数控加工机床中的可能性,这一软件系统的应用范围非常广泛,涵盖了从 VDMA 标准的接口技术解决方案到 CNC 数控技术的机器人全部操作、编程、调试、维护保养和故障诊断等多个方面。
一直以来,在机床控制系统与机器人的控制中一直都是采用相互交换数据和信息的方式来实现数控机床与机器人之间的互联控制。但是这种情况现在发生了变化,因为西门子的 Sinumerik-CNC 数控系统的算法语言已经具有直接控制机器人机械运动的能力了,在西门子公司开发的 Sinumerik Run My Robot/DirectControl 软件系统中,CNC 数控系统还承担着机器人手臂的驱动控制,能够完成所有典型的机器人安全保护功能,简单地说就Sinumerik Run My Robot/Direct Control软件系统承担了部分过去机器人控制系统所承担的任务。
一致性的 CNC 机器人 | 一体化接口
前后不断地、连续性地 CNC 机器人一体化接口技术开拓了机器人的应用领域,西门子公司除了与可靠的机器人合作伙伴 KUKA 公司合作在 Sinumerik Run My Robot软件系统中的上下料操作和加工等方面进行合作之外,还与 Comau 公司在直接控制技术方面进行了合作。这些软件技术方面的成功为硬件设计和制造带来了许多好处,例如硬件的空间占用更小、电气控制柜更加简单、减少了投资和配件数量等优势。同样,也提高了平均无故障工作的时间和机床设备的可用性。集成到 CNC 数控系统中机器手臂的直接控制能够实现最高的机器人动态性能,提高了机器人手臂运动的准确性,这也使机器人能够完成高要求的加工任务。
在西门子Sinumerik Run My Robot/Direct Control软件系统的控制下机器人的动态性能也更高了,控制程序的执行更加稳定精确,改善了平行于机动时间内的各种加工和操作。
预设置的机器人专用组成部件
简化了调整试车
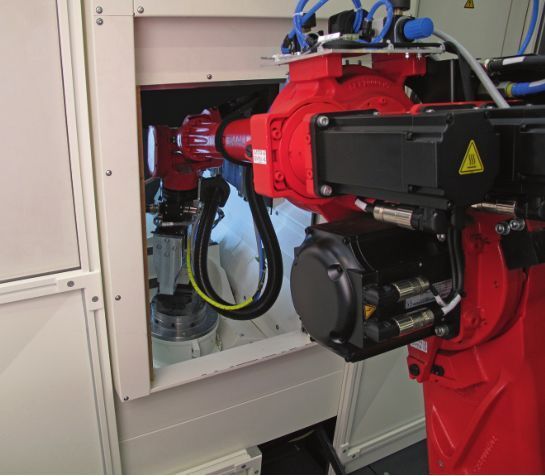
图:西门子利用Sizer和Create My Config两个预配置功能完成了机器人手臂的设计和自动调试
软件系统的配置工具‘Sizer- 选择项’中包含了所有机器人手臂运动的种种配置,在选定了一种机器人手臂之后,实际上也就完成了它的配置,因为根据机器人的类型就可以选择它的配置,然后再添加到工程项目中,就万事大吉了。
机器人手臂的调试、试运行也非常简单,只需利用一个数据通道将机器人生产厂家的各机械运动的数据输入到 Sinumerik 数据程序中就可以了,Sinumerik软件系统中的配置功能会将这些数据直接转换为 CNC 数控数据,其中包括了机器人专用的、优化后的驱动参数。CNC 数控系统将机器人手臂的运动转换为自动的工作循环,最终使其成为可以通过示教功能或者在其他Sinumrik 数控程序支持编程语言的支持下转换为数控程序。
其他的技术工作也按照数控技术进 行 了 贯 彻 落 实。例 如,NX CAMRobotics 就是一款设计使用 Run MyRobot/Direct Control控制程序的机器人手臂设计软件,利用运动学的三维机器人模型和虚拟的 Sinumerik VNCK软件内核,可以真实的模拟由 CAD/CAM 生成的数控程序段,机器人、程序段和 CNC 数控程序等都可以在同一系统中进行模拟。这样就可以在实际使用机器人手臂之前完成其运动性能的验证和优化了。
加工机床所需的或者是机器人所需要的程序段都通过 Sinumerik 软件系统的信道同步进行协调,这样一来,机器人就可以在不同的同步和异步运动以及机动和辅助加工时间内交替的转化工作,进而优化了机器人的工作负荷,使其能够灵活的使用各种加工辅具,同时也提高了机加工的经济性。
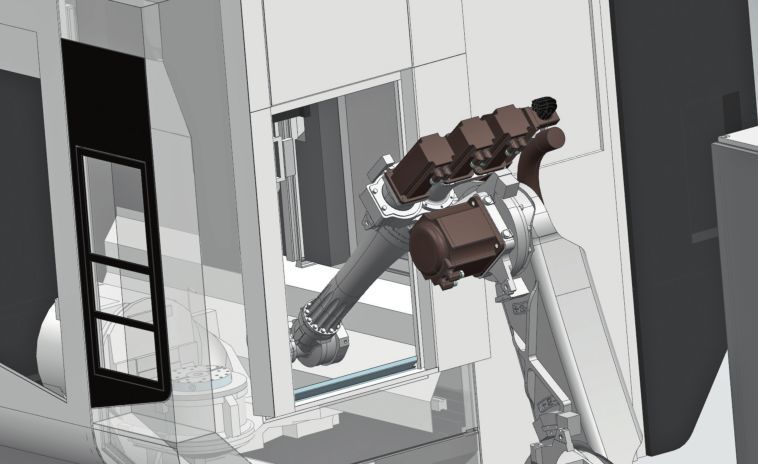
图:编制和优化后的数控程序能够在离线状态下在 NX CAM Rpbptiks 和 VNCK 环境中简单的做好真实的生产准备工作。
